2020车联网行业市场发展趋势分析,政策落地速度超预期推动车联网建设加快发
据电车汇消息,近日发改委、工信部等11个国家部委联合下发了“关于印发《智能汽车创新发展战略》的通知”,通知中提出到2025年,中国标准智能汽车的技术创新、产业生态、基础设施、法规标准、产品监管和网络安全体系基本形成。到2035年,中国标准智能汽车体系全面建成的目标。本次文件是2018年1月征求意见稿后的正式文件。
其中还提出,到2025年,实现有条件自动驾驶的智能汽车达到规模化生产,实现高度自动驾驶的智能汽车在特定环节下市场化应用。智能交通系统和智慧城市相关设施建设取得积极进展,车用无线通信网络(LTE-V2X等)实现区域覆盖,新一代车用无线通信网络(5G-V2X)在部分城市、高速公路逐步开展应用,高精度时空基准服务网络实现全覆盖。
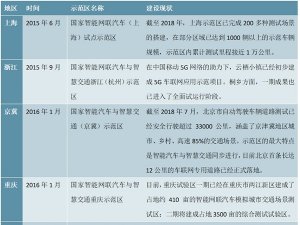
并提出,推动有条件的地方开展城市级智能汽车大规模、综合性应用试点,支持优势地区创建国家车联网先导区。
本次文件出台时间节点超出市场预期,对智能驾驶、车路协同V2X板块形成直接推动,国家推进车联网建设的趋势进一步加快。当下在5G基础设施建设、汽车电子普及、电动汽车快速发展的三大基础之上,车联网市场爆发成为确定性机遇,政策驱动下全产业链有望充分受益。计算机行业车联网子版块主要包括软件厂商&图商、GIS国产化厂商、ETC设备厂商、智能车载终端厂商、智能车载监控厂商5个部分。我们持续推荐交通综治龙头千方科技(002373)、ETC及V2X领先设备厂商金溢科技(002869)、智慧停车龙头捷顺科技(002609),建议关注车载监控行业标的以及中科创达(300496)、四维图新(002405)。详见本团队2020年1月14日专题报告《车联网行业专题:车联网成5G应用先锋,车、路、网、停车场迎产业升级》。
本文主要就低估值的车路协同V2X领域进行探讨,为各位投资者提供参考。中国V2X标准制定引领全球,政策与建设力度领先
当下,交通安全、效率、服务都有待提升,是国家重点关注的民生问题,新技术的应用在智能交通发展上具有重大意义。V2X是采用先进的无线通信和新一代互联网等技术,实现车与各交通要素的直接交互,综合实现碰撞预警、安全预防及通报、辅助驾驶等多种应用;同时,通过与云端的交互,车辆可以实时获取全局交通网络的状态并作出及时反应,从而形成安全、高效和环保的智慧交通有机体系。
V2X的底层通信技术主要有DSRC和C-V2X两种。DSRC基于IEEE802.11p,欧洲(G5)及美国(WAVE)均以DSRC为核心技术。C-V2X包含LTE-V2X和5GV2X,其中LTE-V2X中国介入较早且具有自主知识产权,5G-V2X现由各国竞相参与。
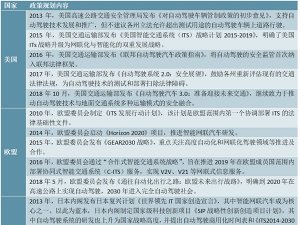
DSRC与C-V2X各有特点和优势,C-V2X实际上更代表未来。802.11p最大的特点是技术成熟度高,已拥有商用的芯片并且测试成熟度也较高。美国交通部在2014年将DSRC确认为V2V的标准,此外,欧洲和日本也都采用DSRC标准,并推出了相关的网联汽车计划。而C-V2X作为后起之秀,虽然起步相对较晚,不过其基于蜂窝通信技术,具有可移动性、可靠性强,最为重要的一点是C-V2X具有前向兼容性的5G演进路线,未来可支持自动驾驶。中国C-V2X路线践行引领全球,发达国家技术选择逐步倾向于C-V2X目前,包括美、欧、日等在内的汽车发达国家和地区都将智能网联汽车作为汽车产业未来发展的重要方向,纷纷加快产业布局、制定发展规划,通过技术研发、示范运行、标准法规、政策支持等综合措施,加快推动产业化进程。跨国车企已经实现部分自动驾驶(L2级)汽车的批量生产,少数高端品牌已率先推出有条件自动驾驶(L3级)汽车;以谷歌为代表的新技术力量,也在积极开展全自动驾驶技术(L4、L5级)的研发和测试。
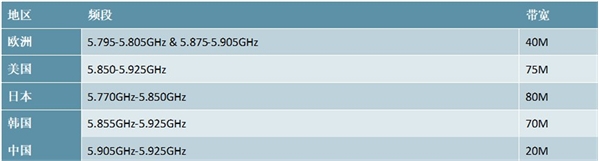
频段划分上,在我国由工信部无委会统一划分频段。2018年10月“世界智能网联汽车大会”闭幕式上,工业和信息化部发布了《车联网(智能网联汽车)直连通信使用5905-5925MHz频段的管理规定》。规划了5905-5925MHz频段共20MHz的专用频率,用于LTE-V2X车联网直连通信技术。目前,欧美日韩均已在5900MHz附近为V2X划分频谱资源,我国工信部确定在5905-5925MHz频段发展车联网,有利于V2X全球产业链的合作协同。
表:车联网全球主要国家和地区频段划分
资料来源:公开资料整理
我国车联网起步较晚,产业链中尤其汽车零部件、整车厂商的差距巨大。但国际社会在技术路线选择上落后于我国,我国2017年即确定C-V2X技术路线,而美国等发达国家在DSRC与C-V2X之间做出选择的速度较慢,2019年底才逐步确定。这也为我国推进C-V2X发展,实现技术创新和产业发展的赶超提供了契机。
在2017年9月中旬,中国智能网联汽车产业创新联盟正式发布《合作式智能交通系统车用通信系统应用层及应用数据交互标准》。该标准为中国汽车工程学会的团体标准,是国内第一个针对V2X应用层的团体标准,为国内各车企及后装V2X产品提供了独立于底层通信技术的、面向V2X应用的数据交换标准及接口,以便在统一的规范下进行V2X应用的开发、测试。
表:《合作式智能交通系统车用通信系统应用层及应用数据交互标准》定义的17项应用

资料来源:公开资料整理
2018年4月全国汽车标准化技术委员会智能网联汽车分标委成立,该分标委专注于汽车信息安全、ADAS、自动驾驶、网联功能和应用、功能安全等方面的标准化工作,并搭建了智能网联汽车标准体系。2018年11月工信部发布了《车联网(智能网联汽车)直连通信使用5905-5925MHz频段的管理规定》,支持LTE-V2X技术在智能网汽车的应用和发展。
美国早期奉行DSRC标准,2019年底通过C-V2X技术行政许可的请求。美国自1999年开始由美国联邦通讯委员会(FCC)为基于IEEE802.11p的ITS业务划分了5850-5925MHz共计75MHz频率、7个信道(每个信道10MHz)的频率资源。
2003年,美国材料试验学会通过了ASTME2213-03作DSRC标准。同年,IEEE协会成立WAVE研究工作组正式接手AST的工作,发展WAVE体系作为DSRC标准。
802.11p标准于2010年颁布,该标准锁定目标于车载环境下的无线通信,主要用于车上用户与路边目标之间、汽车之间等的通信。IEEE802.11p是一个由IEEE802.11标准扩充的通讯协定,主要应用于DSRC系统中。
IEEE1609标准则是以IEEE802.11p通讯协定由IEEE汽车技术学会智能运输系统委员会发起为基础的高层标准。它主要为支持美国运输部的汽车基础设施活动和智能运输系统项目提供无线通信组件。这些试用标准计划将根据实验结果进行更新随后成为正式使用的标准。
IEEE802.11p与上层IEEE1609共同构成WAVE系列标准,SAE则以WAVE为基础设计制定了SAEJ2945、J2735相应协议标准,共同构成了美国交通部推进DSRC专用短程无线通信项目的基础。
2019年12月福特、戴姆勒、大众和英特尔等巨头的蜂窝车联网(C-V2X)技术行政许可请求获得美国联邦通信委员会一致投票通过,将重新分配5.9GHz频段的75MHz频谱,其中一部分将用于C-V2X技术。业界称之为车联网标准之战的重大转折,说明美国或转向C-V2X技术路线。
欧盟持续奉行DSRC技术标准。
1995年起,欧洲标准化委员会CEN与国际化标准组织ISO共同制定了欧洲DSRC标准,包括:EN12253:20045.8GHzDSRC物理层标准;EN12795:2002DSRC数据链路层:媒体接入和逻辑信道控制标准;EN12834:2002DSRC应用层标准;EN13372:2004DSRCRTTT应用模型;ENISO14906:2004电子收费接口标准。其中,EN12253,EN12795和EN12834形成了三层架构的DSRC标准,分别定义了物理层、数据链路层和应用层。
目前,IEEE与ETSI统一了DSRC标准,二者只在控制信道(CCH)分配、接收功率等方面不同。
EEE和ETSI标准规定的DSRC由V2I和V2V两部分组成,后者又称车载自组网。V2I通信当中,基础通信设施通常固定在路边,称为路侧设备,车上通信设施称为车载设备。另外,SAE为VANET中的安全应用场景也进行了定义了,即安全服务消息集标准SAEJ2735。
日本以DSRC标准为主,2019年底首次完成C-V2X实验。日本已自1997年起由TC204委员会制定发展了自己的系列DSRC标准,将DSRC频段划分为7组对应不同应用。日本的DSRC标准被称为ARIB,定义了物理层、数据链路层和应用层。TC204后通过决议支持最终的IEEE802.11p版本。
2019年12月13日,大陆集团宣布已经与爱立信、日产、日本电信运营商NTT多科莫移动通信网公司、日本冲电气工业株式会社以及高通技术公司在日本完成蜂窝V2X联合实验。上述公司成功使用5.8GHz作为直接通信的实验无线电射频,进行了日本的首次C-V2X试验。此次试验用例主要是解决V2X通信的各个方面,如车到车(V2V)、车到基础设施(V2I)、车到行人(V2P)直接通信以及车到网络(V2N)运营。
中国道路智能分级清晰,对智慧道路建设形成明确指引,国际领先2019年9月,中国公路学会自动驾驶工作委员会、自动驾驶标准化工作委员会发布了《智能网联道路系统分级定义与解读报告》(征求意见稿),将交通基础设施系统分为L0级、L1级、L2级、L3级、L4级、L5级。
L0(无信息化/无智能化/无自动化)为传统道路信息管理方式,即交通基础设施与单个车辆系统之间无信息交互。主要特征为交通基础设施无检测和传感功能,由驾驶员全程控制车辆完成驾驶任务和处理特殊情况。
L1(初步数字化/初步智能化/初步自动化)仍为传统道路信息管理方式。主要特征有:道路系统能够采集数字化交通基础设施静态数据并进行更新和储存,交通基础设施感知设备能实时获取连续空间的车辆和环境等动态数据,自动处理非结构化数据,并结合历史数据实现车辆行驶的短时、微观预测;各种类型数据之间无法有效融合,信息采集、处理和传输的时延明显;交通基础设施感知信息和预测结果可实时提供给车辆,辅助车辆自动驾驶如提供信息服务和主动交通管理服务;交通基础设施向车辆系统进行单项传感。
L2(部分网联化/部分智能化/部分自动化)为交通基础设施具备复杂传感和深度预测功能,通过与车辆系统进行信息交互(包括I2X),可以支持较高空间和时间解析度的自动化驾驶辅助和交通管理。除I1中提供的功能外,可以实现基础实施等静态数据在时空上的连续监测和更新;具备更高精度的车辆和环境等动态非结构化数据的检测传感功能;实现数据高度融合,信息采集、处理和传输的时延低;支持部分数据在车与车之间、车与基础设施之间的实时共享,提供深度分析和长期预测;有限场景内可以实现对自动驾驶车辆的接管和控制,实现限定场景的自动化驾驶和决策优化。其局限为:遇到特殊情况,需要驾驶员接管自动驾驶车辆进行控制;无法从系统层面进行全局优化;主要实现驾驶辅助,需在有限场景内完成自动驾驶。
L3(基于交通基础设施的有条件自动驾驶/高度网联化)定义为高度网联化的交通基础设施可以在数毫秒内为单个自动驾驶车辆(自动化等级大于1.5及以上)提供周围车辆的动态信息和控制指令,可以在包括专用车道的主要道路上实现有条件的自动化驾驶。主要特征有:交通基础设施具备高度的网联化和有条件的智能化;在交通基础设施覆盖的道路上可以支持单个自动驾驶车辆的部分自动化驾驶功能;交通基础设施系统可实现对自动驾驶车辆的横向和纵向控制;可运行在包括具有专用车道等的主要道路的限定场景;遇到特殊情况,需要驾驶员接管。
L4(基于交通基础设施的高度自动驾驶)交通基础设施为自动驾驶车辆(自动化等级大于1.5)提供了详细的驾驶指令,可以在特定场景/区域(如预先设定的时空域)实现高度自动化驾驶。遇到特殊情况,由交通基础设施系统进行控制,不需要驾驶员接管。主要特征有:具备高度的信息化和智能化;可为单个自动驾驶车辆提供周围车辆的动态信息和纵横向控制指令;可对自动驾驶车辆(自动化等级1.5或以上)进行横向和纵向的控制;交通控制中心可更优调配所覆盖的车辆,达到全局最优化;在特定场景/区域混合交通场景下可实现高度自动化驾驶;遇到特殊情况,由交通基础设施系统实施控制,不需要驾驶员接管。但是仍局限于试验场和园区,自动泊车停车场等封闭区域;高速公路、城市快速路;部分城市主干网络和公交专线。
L5(基于交通基础设施的完全自动驾驶)为交通基础设施可以满足所有单个自动驾驶车辆(自动化等级大于1.5及以上)在所有场景下完全感知、预测、决策、控制、通讯等功能,并优化部署整个交通基础设施网络,实现完全自动驾驶。完全自动驾驶所需的子系统无需在自动驾驶车辆设置备份系统。提供全主动安全功能。遇到特殊情况,由交通基础设施系统进行控制,不需要驾驶员参与。