全球自动驾驶行业市场发展趋势分析,欧盟重视顶层设计和新技术研发在关键领
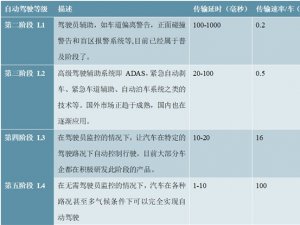
美国汽车工程师学会SAE于2014年发布了自动驾驶汽车分级标准并为美国交通部采用。分为从无自动化至全自动化共六个等级。
2018年12月该分级更新至J3016™驾驶自动化等级。新标准变动较小,保留了各级别命名、编号、功能差异及起辅助作用的相关术语,同时做了术语、适用范围、低级别明确区分的优化。
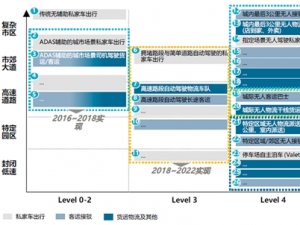
在L0-L5中,L0-L2需要驾驶员处于驾驶状态,并时刻观察各种情况;L3-L5驾驶员仅需坐在驾驶座上,L3需要驾驶者需要时接管车辆。其具体区别为:
L0可支持自动紧急制动、视觉盲点提醒、车身稳定系统;L1具有车道偏离修正或自适应巡航;L2具有同时仅需车道偏离修正和自适应巡航;L3、L4即为自动驾驶可以在有限制的条件下驾驶车辆,如L3可在交通拥堵的情况下自动驾驶;L4无需安装踏板、转向等装置;L5与L4相似但可以在任何条件下进行车辆驾驶。
1、欧盟对于道路智能和汽车智能的定义较为清晰
欧洲的道路交通咨询委员会ERTRAC每两年发布一个自动驾驶开发路线图,在其2019年发布的版本中,自动驾驶基础设施分级(ISAD)A-E共5个等级。其中A-C级为数字化基础设施:A级为通过协同决策实现自动驾驶,B级为协同感知,C级为动态数字信息;D-E级为便利基础设施,D级仅能支持数字地图,E级则无法支持。该版本还定义了自动驾驶车辆开发路径的L0-L5共6个等级:
L0无自动驾驶,提供部分的警告功能;
L1驾驶辅助,驾驶员监控驾驶环境,驾驶员和系统共同执行车辆的加减速和转向的动作,动态驾驶任务的反馈主要由驾驶员完成;
L2部分自动驾驶,主要由驾驶员监控驾驶环境,系统通过驾驶环境信息的判断执行加减速和转向动作,动态驾驶任务的反馈主要由驾驶员完成;
L3有条件自动驾驶,监控驾驶环境的主体为自动驾驶系统,同时系统完成加减速及转向等驾驶操作,动态驾驶任务的反馈主要由驾驶员完成,根据系统请求,驾驶员需提供适当的干预;
L4高度自动驾驶,由自动驾驶系统监控驾驶环境完成驾驶操作,特定环境下系统会向驾驶员提出响应请求,驾驶员可以不进行响应。
L5完全自动驾驶,在所有的驾驶模式下,包括监控驾驶环境、执行驾驶操作、对动态驾驶任务进行反应等均为自动驾驶系统负责。
2、日本道路智能的定义并不清晰。
日本政府和23家企业于2005年共同发起了Smartway计划,其发展重点是整合日本各项ITS功能及建立车载单元的公共平台,使道路与车辆实现ITS通信双向传输,通信的关键在路侧安装ITS点和车载导航系统之间实现高速和大容量通(5.8GHz),接收路侧ITS点传送的各种服务。
根据日本建设省公布的ITS发展手册,其致力于ETC与AHS的发展。中国V2X政策频繁落地,近日政策发布时点超出市场预期
我国近年来的V2X相关政策梳理如下:
2016年4月交通运输部印发《交通运输信息化“十三五”发展规划》,开展智慧交通示范工程。
2016年7月发改委联合交通运输部印发《推进“互联网+”便捷交通促进智能交通发展的实施方案》,明确了智慧交通示范的重点任务。
2016年10月工信部发布《智能网联汽车技术路线图》,推动智能网联汽车相关产业链快速发展。
2017年2月国务院发布《“十三五”现代综合交通运输体系发展规划》
2017年4月工信部、发改委和科技部联合发布《汽车产业中长期发展规划》,提出以新能源汽车和智能网联汽车为突破口引领产业转型升级。
2017年6月中国智能网联汽车产业创新联盟成立,以工信部作为联盟指导单位,联合了中国汽车工程学会、中国汽车工业协会和汽车、通信、交通、互联网等领域的企业、高校、研究机构。
2017年9月工信部部长主持国家制造强国建设领导小组车联网产业发展专项委员会第一次会议,明确指出“促进LTE-V2X车联网无线通信技术等新技术的部署和应用”。
2017年9月工信部发布关于《国家车联网产业标准体系建设指南》,公开征求意见。
2018年1月发改委产业协调司《智能汽车创新发展战略》征求意见稿,规划到
2020年智能汽车新车占比达50%,大城市、高速公路的车用无线通信网络
(LTE-V2X)覆盖率达90%,到2025年,新一代车用无线通信网络(5G-V2X)基本满足智能汽车发展需要等相关要求。
2018年2月,交通运输部发布《关于加快推进新一代国家交通控制网和智慧公路试点的通知》,推进九省市智慧公路试点,指明智慧公路六个重点研究方向。
2018年3月工信部发布《2018年智能网联汽车标准化工作要点》,以充分发挥标准对智能网联汽车产业供给侧结构性改革的促进作用。
2018年4月工信部、交通部、公安部印发《智能网联汽车道路测试管理规范(试行)》,推动汽车智能化、网联化技术发展和产业应用。
2018年6月工信部、国家标准委联合印发《《国家车联网产业标准体系建设指南(总体要求)》,旨在发挥标准在车联网产业生态环境构建中的顶层设计和引领规范作用。
2018年7月交通部印发《自动驾驶封闭场地建设技术指南(暂行)》,是国家部委出台的第一部关于自动驾驶封闭测试场地建设技术的规范性文件。
2018年11月工信部印发《车联网(智能网联汽车)直连通信使用5905-5925MHz频段管理规定(暂行)》,规划20MHz带宽的专用频率资源用于LTE-V2X直连通信技术。
2019年7月交通运输部印发,《数字交通发展规划纲要》,指出加快交通运输信息化向数字化、网络化、智能化发展。
2019年9月,国务院印发《交通强国建设纲要》明确我国我国将分两个阶段推进交通强国建设,作为建设交通强国的顶层设计和系统谋划,确定了我国交通建设的重点任务。
近日,发改委、工信部等11个国家部委联合下发了“关于印发《智能汽车创新发展战略》的通知”,通知中提出到2025年,中国标准智能汽车的技术创新、产业生态、基础设施、法规标准、产品监管和网络安全体系基本形成。
到2035年,中国标准智能汽车体系全面建成的目标。文件推出的时间节点超出市场预期,未来相关行动计划等配套政策也有望逐步出台,利好行业发展。美国以企业为主体、通过政府平台和市场力量发展相关技术。
1995年,美国交通部出版了“国家智能交通系统项目规划”,规定了智能交通系统的领域和服务功能,确定了到2005年的年度开发计划。
1999年,美国联邦通信委员会(FCC)划分了5.9GHz频谱处的75MHz(5.85~5.925GHz)用作V2V和V2I通信。
2003年,美国交通部发布了VII车路协同系统项目,2009年更名为IntelliDrive并纳入了原独立进行的CICAS协同式交叉路口碰撞防止系统和SafeTrip-21两项目,2011年再次更名为智能互联汽车研究(CVR)。
2009年,美国交通部发布了《智能交通战略研究计划2010-2014》,对美国车联网技术的发展目标、实现途径及智能交通系统建设等问题进行了规划部署。
2016年12月,美国交通部正式发布《联邦机动车安全标准——第150号》(FMVSSNo.150),推动DSRC强制安装立法,计划将在2023年强制所有轻型车辆配备车用DSRC技术。
2015年美国交通运输部与美国智能交通系统(ITS)共同发布了《智能交通系统战略规划2015-2019》,明确了未来5年在智能交通领域的发展方向。
2018年发布《准备迎接未来交通:自动驾驶汽车3.0》,推动自动驾驶技术与地面交通系统多种运输模式的安全融合。美国加州放开道路测试,允许开展试点项目逐步推进自动驾驶的商业化进程。
2019年12月福特、戴姆勒、大众和英特尔等巨头的蜂窝车联网(C-V2X)技术行政许可请求获得美国联邦通信委员会一致投票通过,将重新分配5.9GHz频段的75MHz频谱,其中一部分将用于C-V2X技术。业界称之为车联网标准之战的重大转折,说明美国或转向C-V2X技术路线。
2003年欧盟的ITS组织ERTICO提出eSafety计划,以保障车辆安全为目的研究车载安全模块的配置。
2006年欧盟提出CVIS车路协同技术的项目,其研究成果于2010年在荷兰阿姆斯特丹进行展示。
2010年欧盟委员会公布的《欧盟2020战略》中提出了面向数字社会的欧洲数字化议程智能增长计划。
2011年欧盟委员会在《欧盟一体化交通白皮书》中提出重点发展车辆智能安全、信息化及交通安全管理。
2013年欧盟推出的“地平线2020计划”中,提出推动合作式智能交通、汽车自动化、网联化及产业应用。
2006年提出的CVIS车路协同技术,2018年公布自动驾驶推进时间表,各国大力推动道路测试;欧盟运输总司出台DelegatedAct法案征求意见稿,意图在欧洲推进合作式智能交通运输系统的部署。
2019年3月,欧盟宣布推进在欧洲道路上部署基于DSRC直连通信的V2X技术。
3、日本政府与民间企业相互合作如以车辆信息通讯系统(VICS)的运作方式调动企业的积极性
1991年日本运输省制定了ASV安全车计划。
1992年日本建设省成立了“智能公路工程顾问委员会”,负责智能公路计划的相关事项。
1996年“推进ITS总体构想”推出了投资预算7.8兆日元的20年规划。
2005年SmartWay智能道路系统形成,由政府企业共同作为开发联盟。
2017年6月发布《远程自动驾驶系统道路测试许可处理基准》,将远程监控定位为远程存在、承担道路交通法规规定责任的驾驶人,允许自动驾驶车辆在驾驶位无人的状态下进行上路测试。
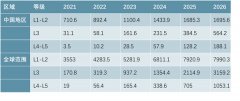
中国试点进度及相关企业布局领先,海外国家建设力度也将加大我国智能网联汽车测试示范区建设领先。目前全国建设的数量超过20个,总体来看,华东地区以9个示范区的数量居6大地区之首。
图:我国智能网联汽车示范区情况一览

资料来源:公开资料整理
此外智慧公路建设也获得了政策的不断支持。
图:我国智慧公路建设获得政策不断推动

资料来源:公开资料整理
智慧公路与车路协同有密切联系,广义的车路协同包括感知、控制、协同、和服务。
图:我国智慧公路建设的主要特征
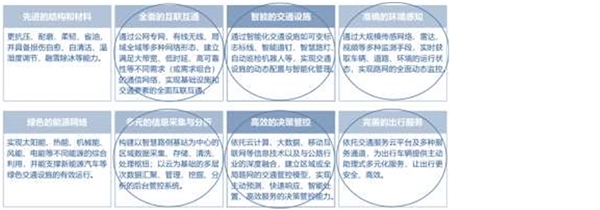
资料来源:公开资料整理
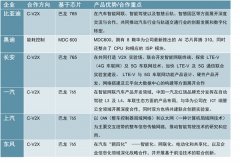
企业方面,技术研发进展及量产部署都优势明显:大唐电信已推出LTE-V2X芯片(支持PC5模式),部署产品开展多项试验;华为推出LTE-V2X芯片(同时支持PC5和UU模式),专注于ICT技术并合作车企;金溢科技、清华、同济联合成立智能车路协同关键技术及装备行业研发中心,推出了全套的C-V2X解决方案;中国移动在房山打造第一条5G自动驾驶车辆测试道路,牵头成立“5G自动驾驶联盟”;百度2018年正式开源Apollo车路协同方案,并与吉利战略合作;阿里巴巴升级了汽车战略:由车向路延展,利用车路协同技术打造全新的“智能高速公路”;上汽、广汽、东风、长安、一汽等13家中国车企联合发布了C-V2X商用路标,并计划2020年开始量产。
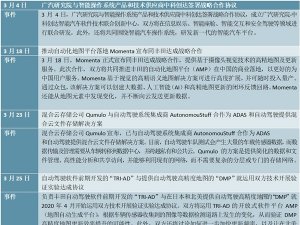
图:我国主要布局车路协同V2X领域厂商的业务进展情况

资料来源:公开资料整理
美国、欧洲、日韩等海外发达国家目前建设进度落后,但重视相关领域建设,其中韩国目标2021年底完成高速公路V2X体系,建设力度有望明显加大。
图:海外主要布局V2X国家建设情况

资料来源:公开资料整理