未来5年高阶自动驾驶汽车产业进入高速发展阶段,高精地图升级
从产业角度看,2019年国内外各大车厂L2级别量产车型即将进入大规模放量阶段,几乎所有大型知名车厂在2020年均将推出L3及以上级别量产车型;政策层面也为2020年前汽车市场L3及以下级别自动驾驶系统装配率制定了较高标准,同时要求2025年前实现装配L4/L5级别系统量产车型上市。宝马、通用、丰田等13家国际车厂在2018年就已实现L2及以上级别车型量产,根据各大国际车厂自动驾驶时间表,在2021年,将有11家国际车厂推出L3-L4级别自动驾驶量产车型。
图:我国及全球L1-L5自动驾驶汽车空间预测(万辆)
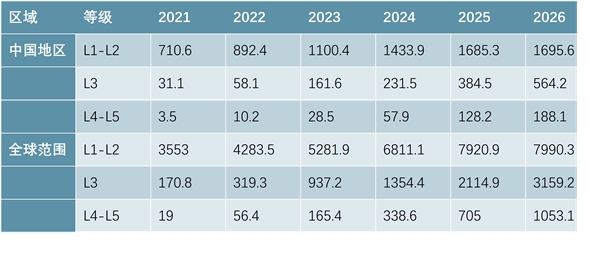
资料来源:公开资料整理
自动驾驶系统的实现主要依赖感知、决策与执行三大模块,在行驶过程中以各类惯导、雷达、视觉等传感器搜集车辆动态与周边环境数据,将数据传输至车载计算平台进行分析并作出相应决策,最后由决策层发送指令至执行模块改变车辆行驶状态。
高阶自动驾驶系统已经可以脱离人工完成自主驾驶任务,这就对驾驶系统的感知能力提出了更高的要求。目前车用传感器性能不足以完全替代人工判断,传感器受勘测范围/环境限制也无法进行超远距离感知,因此高阶自动驾驶系统必须依靠高精度地图的超视距、全路程预判能力作为感知补充进行辅助决策。
图:自动驾驶系统可分为感知、决策与执行三类模块
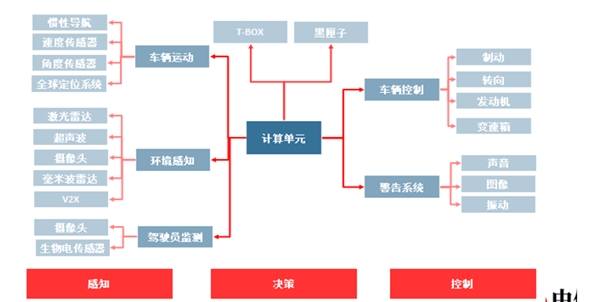
资料来源:公开资料整理
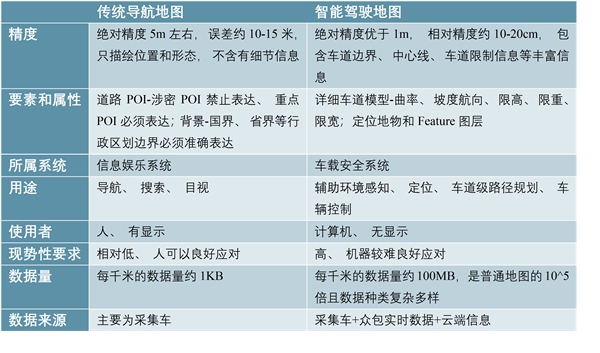
传统导航地图仅需为驾驶员提供路径规划信息,而高精度地图则需要为车载计算机构建自动驾驶车辆在行驶期间周边环境的模型。高精度地图同时具备高精度、高丰富度、高更新频次三大特点。传统导航地图精度约为10米左右,而ADAS级地图精度处于米级,HAD级别地图精度已经需要达到厘米级;在信息丰富度方面,传统导航地图仅包含简单道路线条、信息点(POI)、行政区划边界,而高精度地图包含详道路模型,包括车道模型、道路部件、道路属性和其他的定位图层,每千米的数据量约100MB,约为传统地图的10万倍以上;高精度地图要求做到数据实时更新,远高于传统导航地图以月计的更新频次,因此其数据来源除了采集车之外,更重要的是通过众包与云端获得的实时更新数据,需要配合边缘计算进行大数据分析,从而辅助自动驾驶汽车分析与决策。
图:高精度地图与传统导航地图对比
资料来源:公开资料整理
高精度地图业务不仅拓宽了四维图新的产品线,更是在市场前景、商业模式、行业竞争门槛等方面获得了阶梯性改变。(1)从卖数据到提供服务,Licese+服务费的收费模式:传统导航电子地图的业务模式是销售数据及后续定期升级维护的有限次模式,但高精度地图需要实时更新的数据,需要从电子地图、云端、第三方等获取,公司为此会收取持续的服务费。公司预计高精度地图售价将是传统地图价格的3-5倍,对标高中低端车平均售价为千元左右;更新服务费全生命周期约几千元,此费用大概率会由车厂支付,后续也可能在出售新车时一次性转嫁至消费者。(2)单车价值大幅提升:高精度地图相较传统导航电子地图所含价值量更高,售价更高。而伴随量产订单落地,毛利率仍可维持高水平,使得该业务利润最终将成倍增长;(3)行业门槛进一步提升:高精度地图在数据精度与鲜度、产业链合作、技术实力、成本控制等方面要求更高,除了测绘资质之外,进一步提高了行业门槛,公司作为先发布局落地的龙头企业有望获取更多市场。
图:自动驾驶时代高精度地图意义
资料来源:公开资料整理
预计四维图新高阶自动驾驶系统配套的高精度地图将于2021年前后逐步开始放量实现规模营收。高精度地图产品售价约为传统导航地图单价的4-5倍,即800-1000元/套;量产初期后续全寿命相关数据升级服务费用约为320-400元/套。2018年我国乘用车销量约2367.2万辆,保守假设2019年乘用车销量下滑10%、2020-2021年乘用车销量保持5%的年复合增速,得到2021年乘用车销量达到2348万辆。假设2021年L3级别以上高阶自动驾驶汽车渗透率为1.38%、四维高精地图产品仍能维持在传统地图领域40%左右的市占率。
结合以上推断,2021年公司高精地图增量收入有望实现1.7亿元,且到2025年有望达到38.8亿元,复合增速预计约117%,2021-2025年高精度地图增量收入共计75亿元。
面向车厂在自动驾驶和自动驾驶到来前的前序测试阶段,公司提供多样化数据产品支持,预计2019年就可以看到该数据服务规模化贡献收入,目前公司基于云端的数据服务主要分为以下几个类别:
1、Locationplatform:公司为下游车厂在云端建立模拟驾驶环境平台,供给各大厂商做未来商用配套服务的探索、预研、论证。同时还可在平台上为各大厂商做提案研究服务,并给出一体化解决方案。
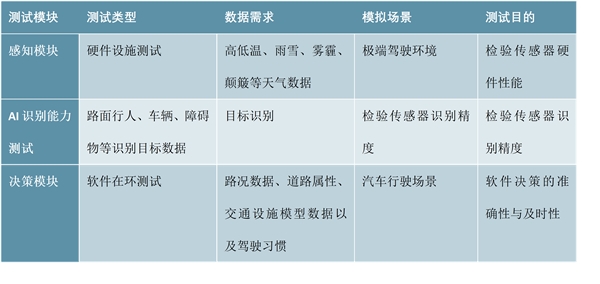
2、自动驾驶汽车测试环境模拟:自动驾驶汽车测试分为硬件在环测试、软件在环测试以及模型在环测试,分别对应检验自动驾驶汽车感知、决策、控制三大模块。在数据测试中,公司可以基于全面的外业能力与云平台本身的数据存储,将大量实景数据、驾驶行为数据以及交通动态数据融合,模拟真实行车环境。
3、自动驾驶启停服务:自动驾驶启停服务可通过大量的后台数据计算,对于车辆在该路段是否可以进行自动驾驶做出判断,进而控制自动驾驶状态的开始与终止。
4、高精度定位:在L3以上级别汽车自动驾驶系统中,确定车辆实时位置是整体路线规划与保障自动行车安全的前提。
图表:自动驾驶测试数据需求一览
资料来源:公开资料整理
在L3以上级别汽车自动驾驶系统中,确定车辆实时位置是整体路线规划与保障自动行车安全的前提,因此高精度地图的一个关键作用就是进行高精度定位。目前用于自动驾驶系统的定位方式主要分为以下三种:1、GNSS定位技术。当前的GNSS技术为多套卫星导航定位技术的结合,其基本原理为利用全球导航卫星系统,结合地面基站接收,最后通过RTK差分技术分析推算出车辆的准确位置。2、环境匹配定位技术,通过车载视觉或雷达传感器感知车辆周边标志性Obiect,将数据传回与高精度地图构建的精准环境模型进行特征对照,从而确定车辆在地图中的位置。3、航迹推算定位。推算定位依靠车辆自带IMU进行惯性推演,IMU只能提供相对定位信息,即物体从某时刻开始相对于某个起始位置的运动轨迹和姿态。IMU定位的作用主要在于验证RTKGPS结果的自洽性,以及在RTKGPS信号突然消失或相对定位失效时,对定位的结果进行航迹推演,继续提供若干秒亚米级定位,为自动驾驶汽车提供异常处理时间。